前置(推荐): CS101
Search
e.g.
- problem: pathing
- states: (x,y) location
- action: NSEW
- successor: update location only
- goal test: is (x,y) = END
- problem: eat-all-dots
- states: (x,y) dot boolean
- action: NSEW
- successor: update location and possibly a dot boolean
- goal: all dots false
状态空间 states:
World State:
e.g. Pacman
- parameters
- Agent position: 120
- Food count: 30
- Ghost: 12
- Agent facing: NSEW
- World States:
- Agent position: 120
- food count: 2
- Ghost: 12*12
- Agent facing: 4
- total: 120 * 2^30 * 12*12 * 4
- state of pathing: 120
- states for eat-all-dots: 120 * 2
针对不同的问题会有不同大小的解空间
状态空间越少越好, 状态空间越大, 搜索越多
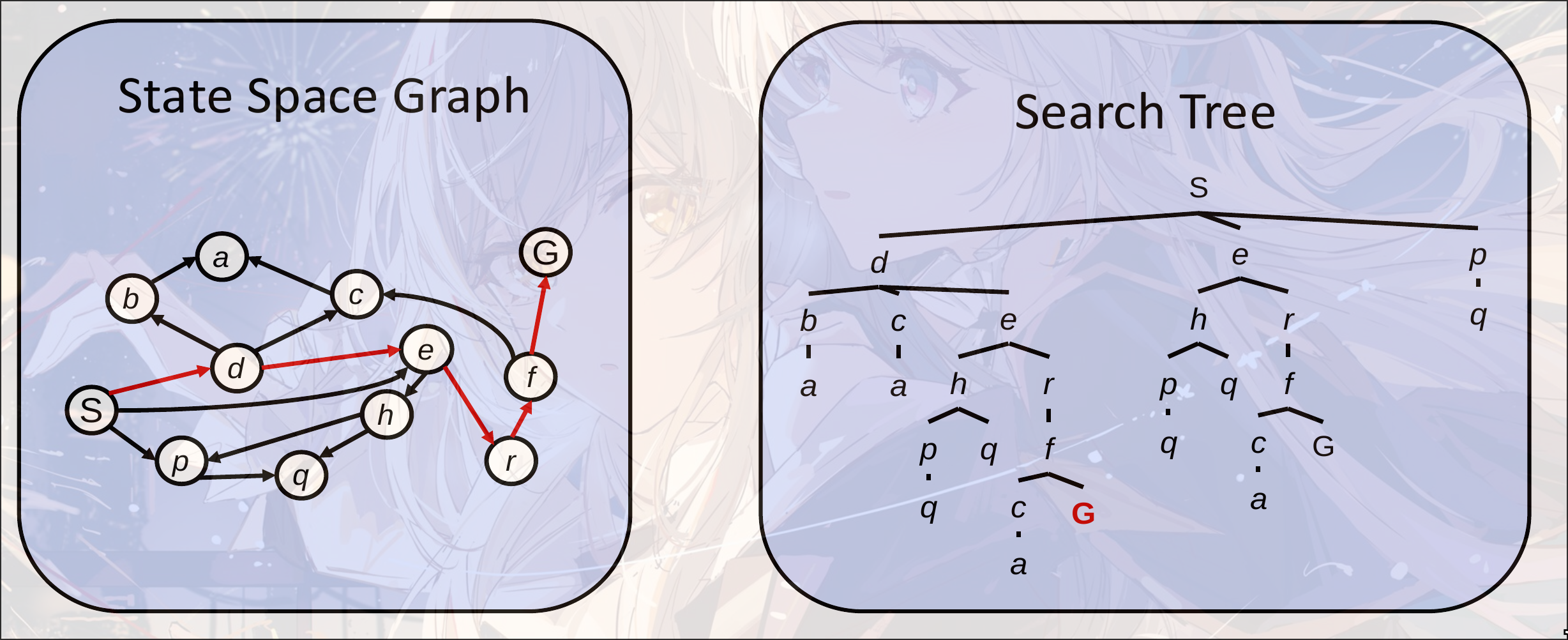
状态空间图 State Space Graph
很少使用这种状态空间图, 因为保存的内容太多了
所以使用另外的一种算法
搜索树 Search Tree
当前状态作为一个根节点, 然后可以往不同决策行进
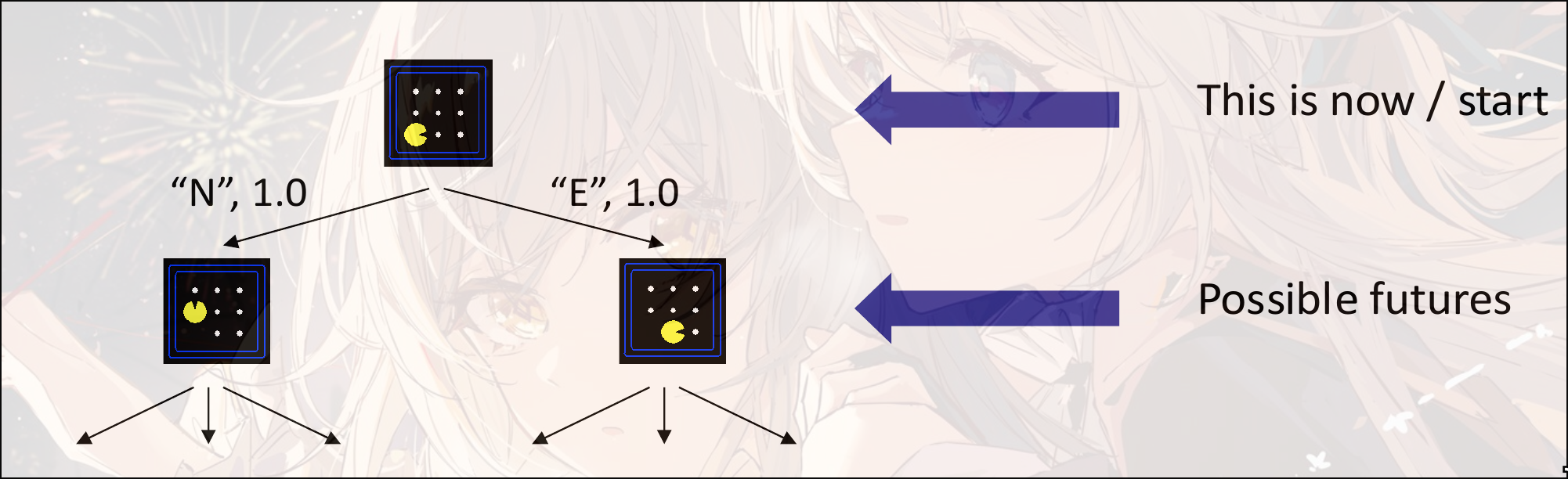
是一种”what if”树
每一个子节点都表示一种可能性(successor)
依然是无法表达出整个状态空间
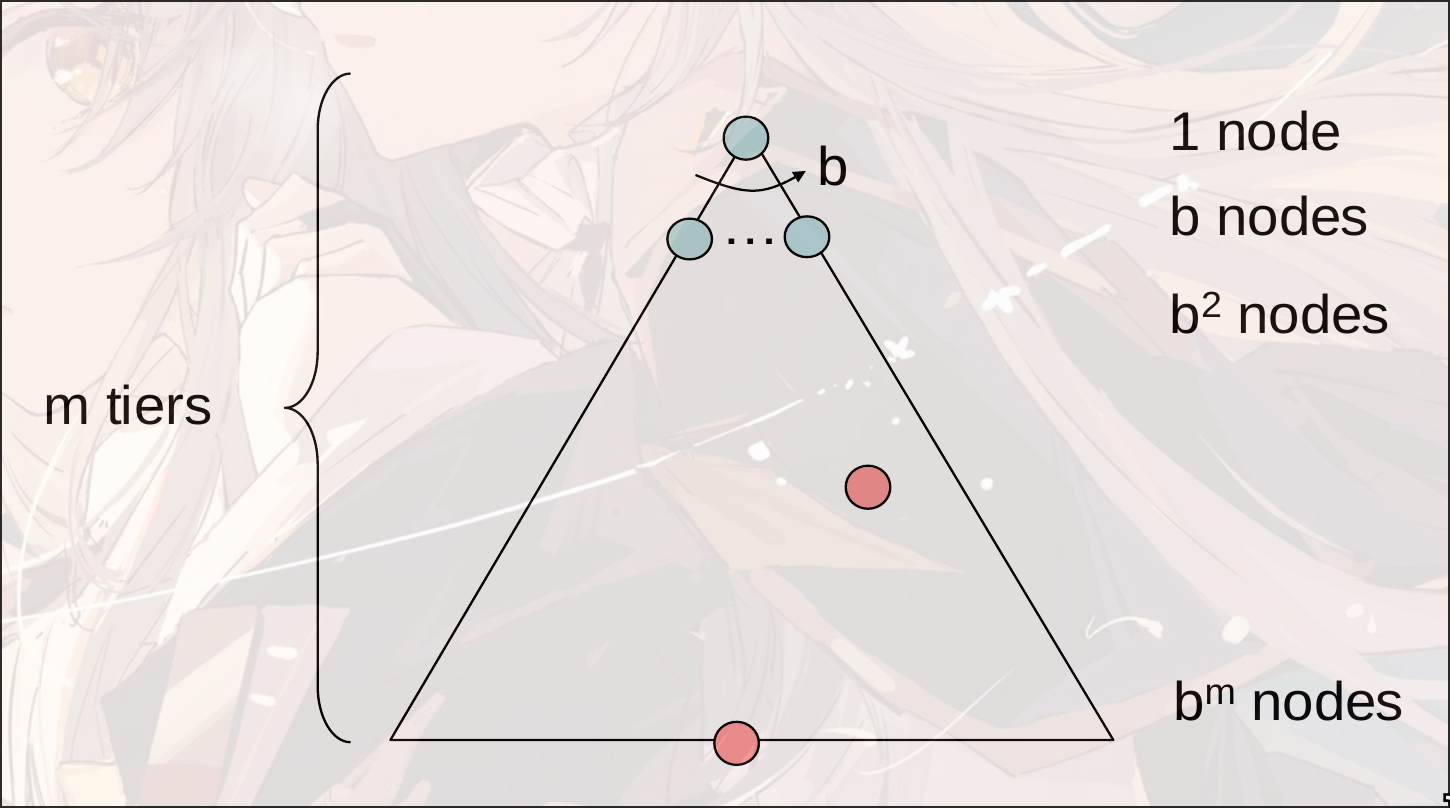
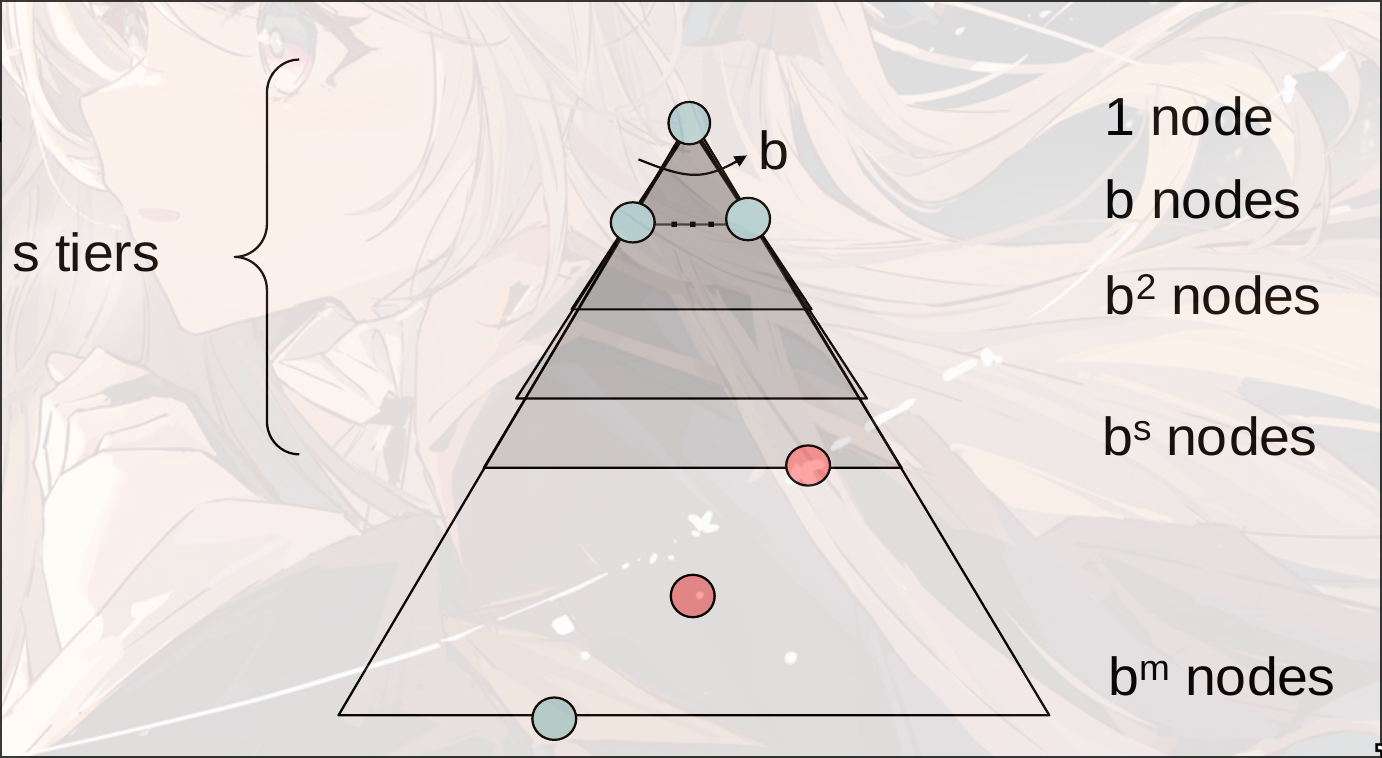
b: branching factor: 表示一个节点可以扩展多少子节点m: maximum depth: 搜索可能达到的最深的路径
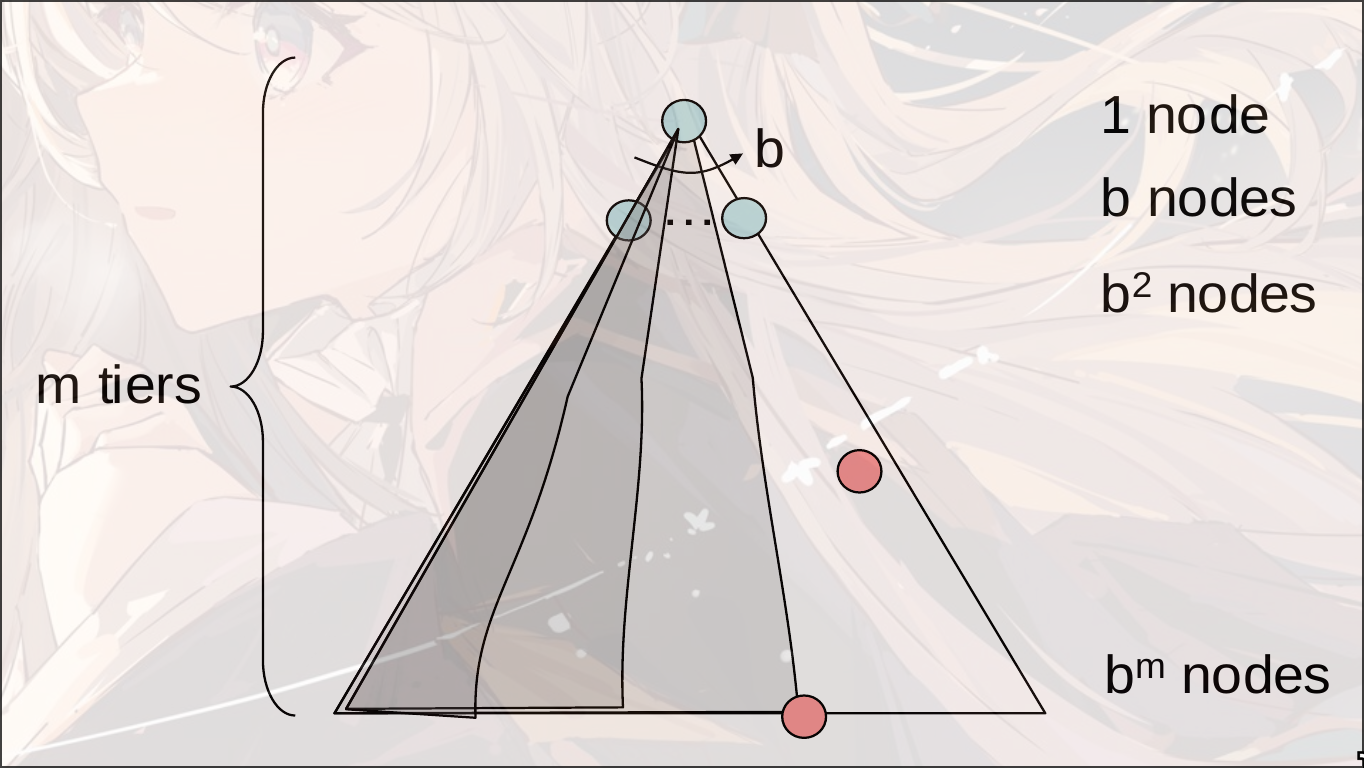
fringe
边缘
维护所有已扩展的路径中的叶子节点的路径(从根节点到该节点的路径)
更新: 选择一个fringe里面的叶子节点, 然后扩展到其子节点.
err
如果图上有环, 那么会导致搜索可能陷入循环, 导致没有optimal
优化: never expand a state twice. 只对某一个state搜索一次, 第二次直接停止.
不会破坏completeness, 因为所有节点还是会被访问到
different between search graph and search tree
搜索
属性
- complete: 是否能找到完整的节点
- optimal: 能否找到最优解
- time complexity
- space complexity
b是branching factor: 表示多少种不同的选择
m是最大深度, 选择的次数
solutions可能在任意深度
一共有
DFS
depth-first search
使用stack来存储
- complete: 如果深度有限那么是完整的
- optimal: 只找到了最左侧的解, 但是并没有考虑深度问题, 所以不是optimal
- time:
- space:
BFS
breadth-first search
-
complete: yes
-
optimal: 如果每一条边的cost是1, 那么才是optimal的
-
time: , 其中表示搜索结果的层级
-
space:
Iterative Deepening
- 限制深度为1, 进行DFS, 判断是否有解
- 如果无解, 那么限制深度为2, 进行DFS, 判断是否有解
- …
上一层的时间复杂度远远小于下一层的时间复杂度, 每一层指数增长, 上一层的搜索对下一层可以忽略不计, 因此实用性比较好
Cost-Sensitive Search
每个状态的转移具有不同的花费.
Uniform Cost Search(UCS)
strategy: 展开cost最小的node
- complete:
- optimal
- time:
- space: 存储到priority queue内部, 比较的是cumulative cost.
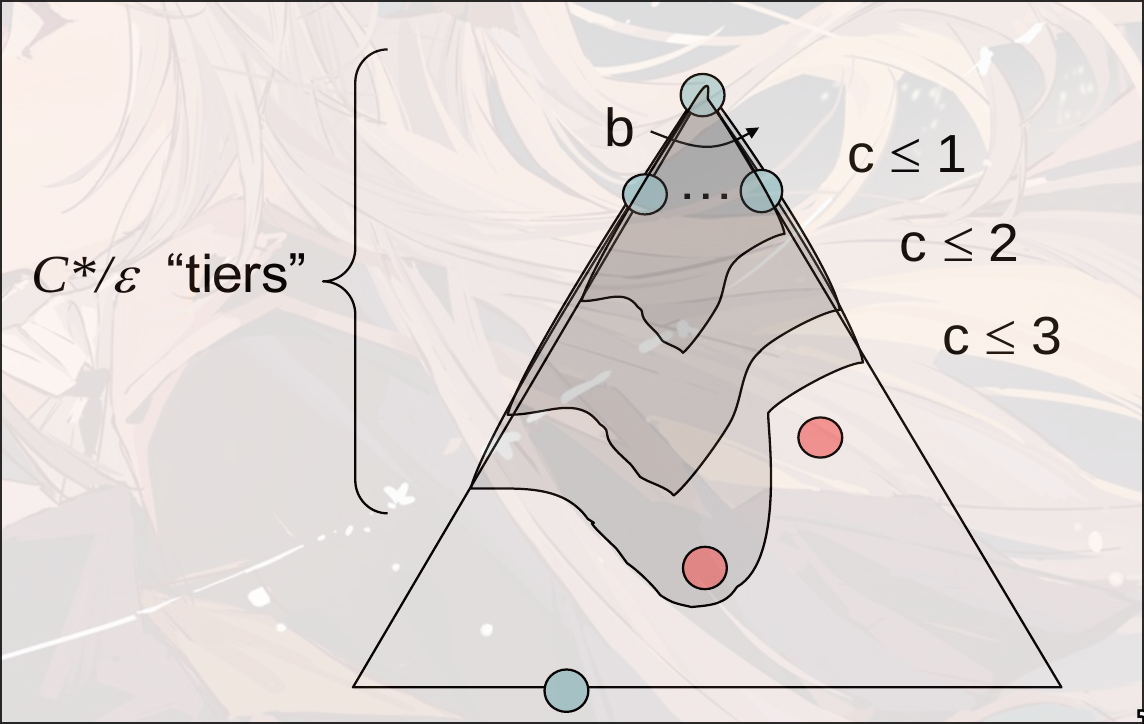
假设最小的花费(最优解)是, 并且这条路上的最小花费是, 那么有效路径长度大概是
缺点: 展开的过程中, 所有展开的距离(cost)是相同的
Model
agent对于world state的一种建模. 需要基于这个建模进行Planning和Searching
e.g. 出门是否带伞: Model: 看了天气预报 / Model: 随机带伞
Search Heuristics
目标函数: 搜索使靠近
Greedy Search
贪心算法: 只考虑当前状态的最优解
best cases:
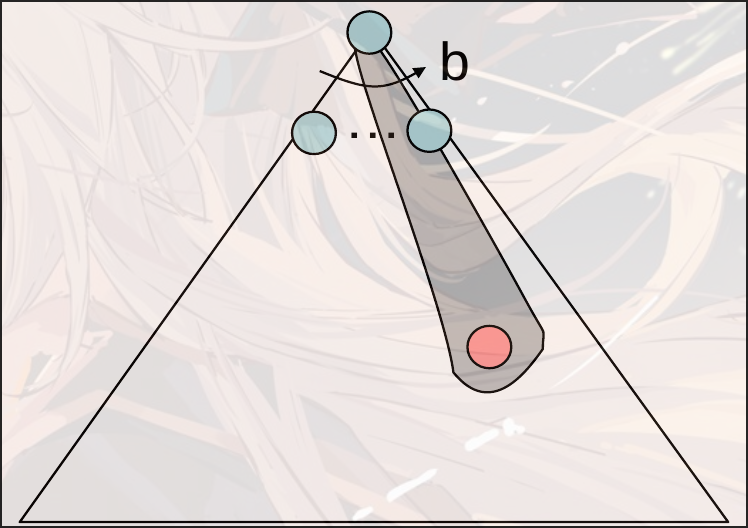
worst cases:
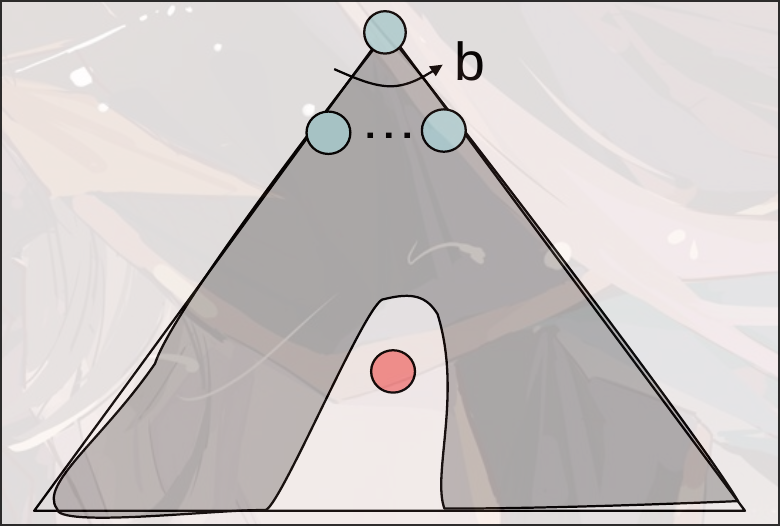
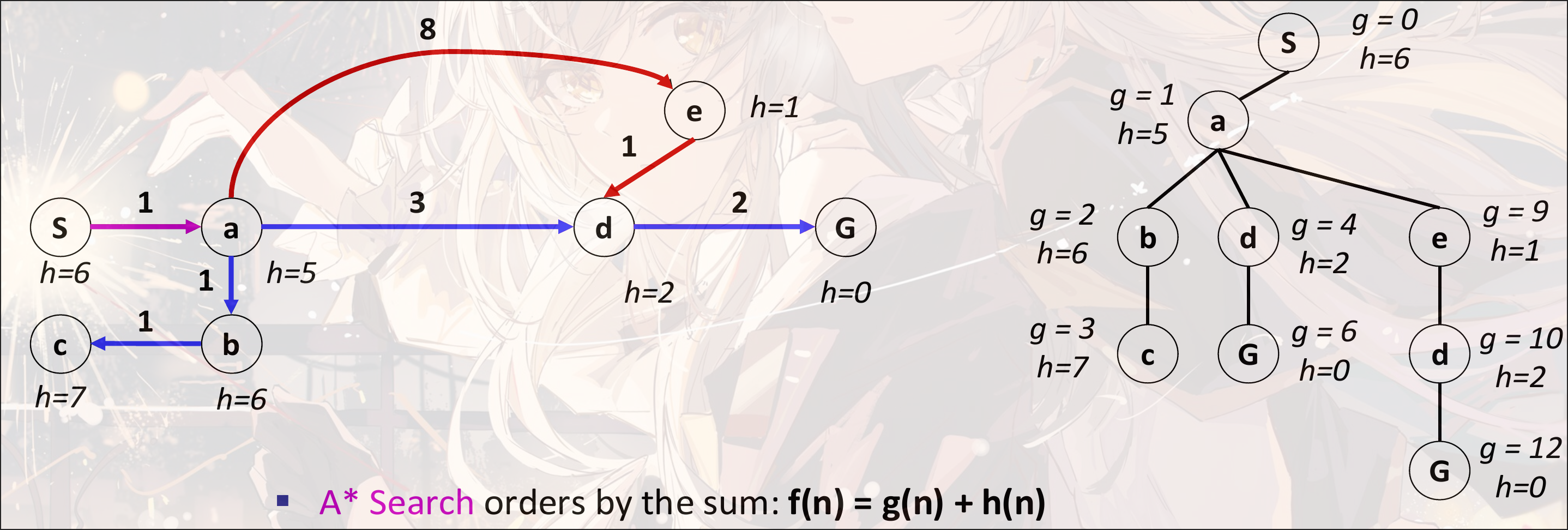
A* Search
uniform-cost search: backward cost 路径的花费:
greedy search: forward cost 未来估计价值:
A* search:
-
complete: 需要让是admissible: 其中是真实距离
-
optimal:
假设:
- 任意节点, 最优解, 次优解
Claim:
-
A will exit fringe before B
A比B先弹出fringe, 表示A会先进行is_goal的测试
Proof:
- 因此, 节点一定在节点之前找到
- A的所有祖先节点都比B先expand
- A比B先expand
所以是optimal的
heuristics越接近真实cost, 搜索代价就越小
admissible
其中是真实距离
consistency
其中表示A到C的实际距离
consistency可以推出admissible