前置: 08-MDP
Reinforcement Learning
所有的 RL tag的文章均基于此
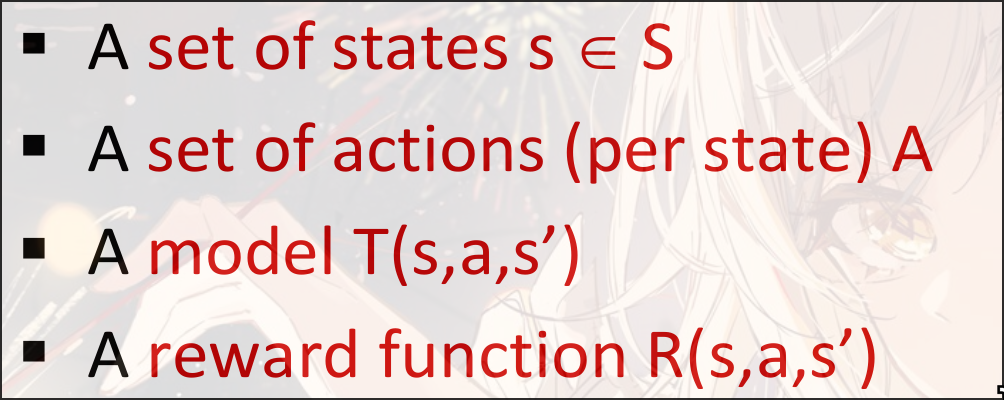
使用类似MDP的定义, 但是这个时候并不清楚或者
在Agent中存在或者说action, 在environment中存在state, reward function和transition function.
认为在environment中的作为ground truth, 因此是function而不是model(model是Agent中学习到的)
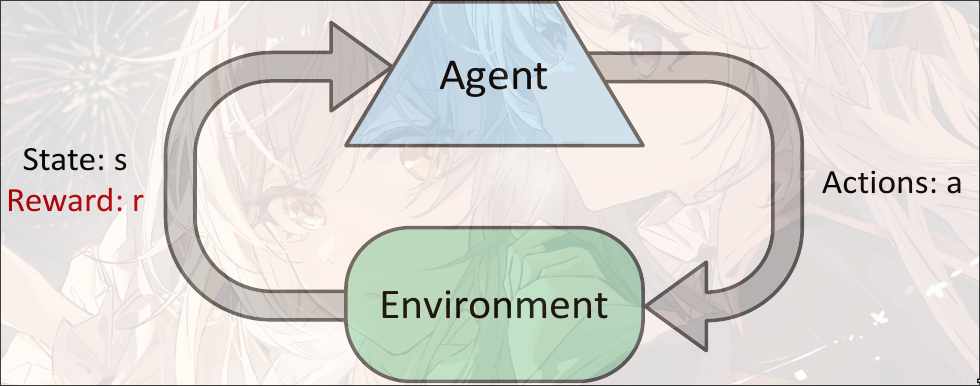
Basic Idea: 假设在时间步有一个策略,
- 找到当前可观测状态
- 找到action:
- 根据environment的transition probability 找到
- 我们的目标是最大化
Offline learning v.s. Online learning:
offline不需要真正运行一次游戏, 不会对环境产生影响(e.g. MDP)
online需要真实运行一次游戏, 对环境影响(e.g. RL)
Model Based Learning
通过经验进行学习一个近似的模型, 然后将学习到的模型进行估计
Step 1: 采取不同的action然后基于outcomes计算MDP Model
-
计算outcomes 根据给定的
a是由给出的, 这个是在Agent中, 我们认为在更新environment的过程中, 是固定的.
-
归一化, 然后计算
我们认为虽然的parameters中有三个, 但是是current state是固定的, 认为是固定的. 因此随机性只产生在处.
-
计算对于每一个给定的
Reward Function是environment中的函数, 有可能是已知的, 但是在真实的environment中也是需要迭代的.
Step 2: 使用MDP的Iteration的方法计算, 更新
Pros:
- 更有效率地利用sample(低sample complexity)
Cons:
-
May not scale to large state space
-
solving MDP is intractable for very large
当状态空间很大的时候, MDP很难搜索
-
-
RL feedback loop tends to magnify small model errors
本身RL就是一个模拟, 自带一定的误差. 多次训练可能会放大这个error
-
Much harder when the environment is partially observable
当空间是not perfect infomation的时候, 很难完整的看到environment
Model Free Learning
Note
model based v.s. model free
假设计算所有人的平均年龄:
- 如果已知每个年龄有多少概率:
- 如果未知
- model based
- model free
区别: 是否要估计某一个统计量的分布. Model free是直接通过sample来模拟一个概率分布
passive v.s. active Reinforcement learning
- passive RL: 在根据过去已经给定的策略下估计, 常见在evaluation
- active RL: 在根据过去给定的策略, 并且手动去测试下估计
Passive RL
简单来说就是policy evaluation
- Input: a fixed policy
- know
- don’t know
- goal: learn state values
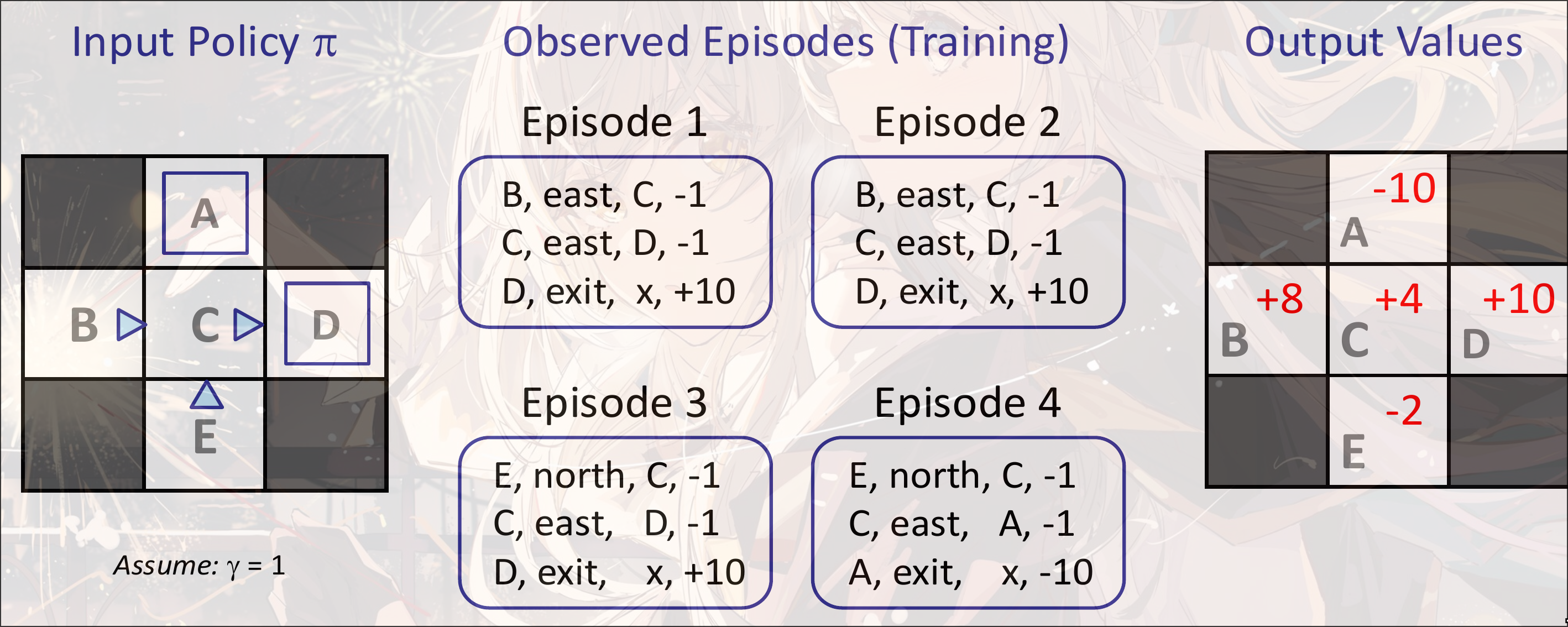
Example
Direct Estimation
Goal: Compute each state value under
Idea: Average together obversed samples values
对于B: 只有两个, 即Episode1, Eposide2, 加和的结果是(8+8)=16, Average=8
对于C: 我们只关心从C开始的, 四个Eposide都有C, 那么只看四个的最下面两个value: (-1+10)+(-1+10)+(-1+10)+(-1-10)=16, Average=4
对于A: 只有一个, Eposide4, -10
对于E: 两个, Eposide3,Eposide4, (-1-1+10)+(-1-1-10)=-4, Average=-2
Pros:
- 易于理解
- 不需要任何关于和的知识
- 使用sample transition能近似计算出来正确的结果
Cons:
- 浪费了state connection的信息, 每个state是独立的, 所以需要很长时间的学习
Sample-Based Policy Evaluation
给定一个固定的策略, state的value是一个期望:
-
Idea1: 使用真实采样去估计期望
但是有一个问题: RL的过程中, 一旦采取了action, 那么environment一定会改变. 如果想要回到上一个状态, 那么需要走回上一个状态. 但是environment已经改变掉了, 因此是无法改变的
-
Idea2: Update value of after each transition
Update based on and
…
有一个问题: 会在结果不精确的前提下flash掉之前的估计的结果. 因为这个是based on一个数据而不是大量数据的平均
-
Idea3:
Note
在有增量的连续数据流的过程中, 如何维持一个average:
记录之前的average和之前的数据量, 增量数据只需要
是凸的combination, 因此是无偏的
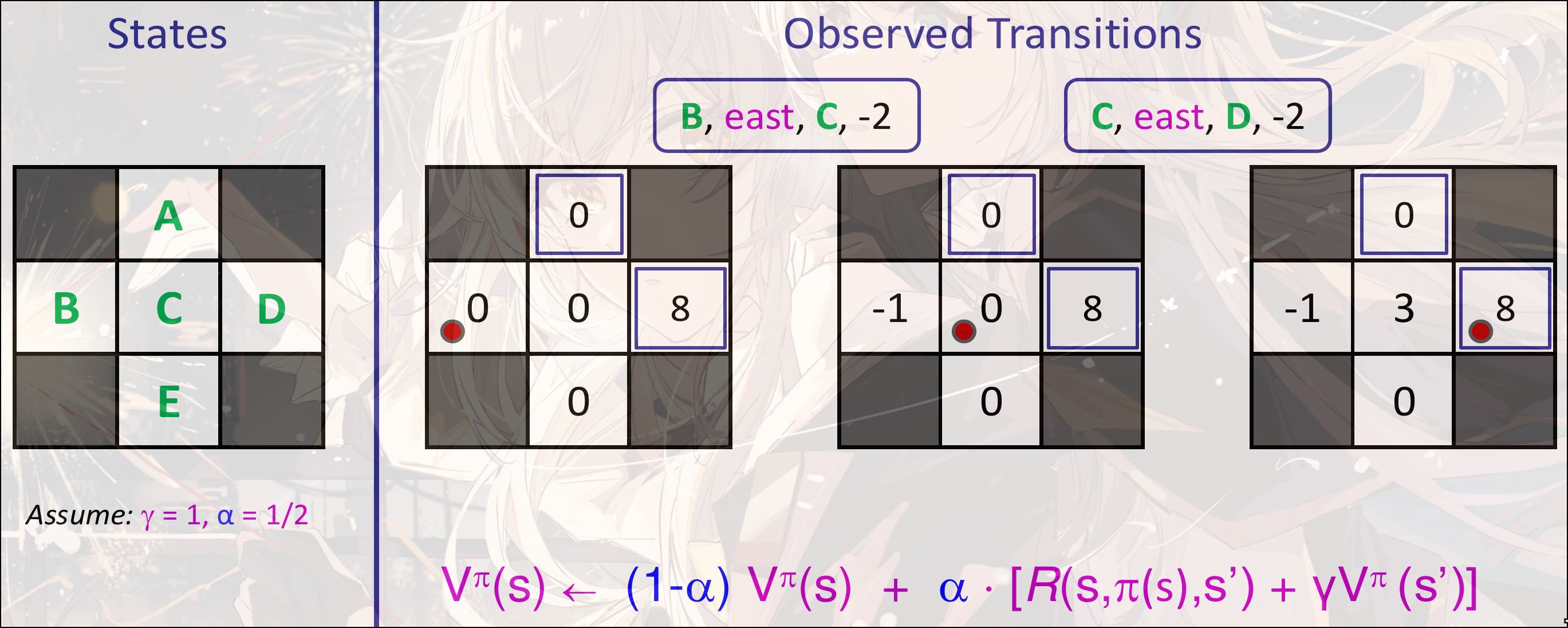
TD Learning
是learning rate. 是TD error
Example
第一个transition:
第二个transition:
TD Value Learning的优点:
- Model free
- Bellman Update with running sample mean
缺点:
- 需要transition model去improve
Q-Learning
对Q-state进行TD Value learning:
我们直接从中学习, 不需要转移模型
缺点: 空间复杂度会比较大. 每一个格子需要存储所有action的value
接受一个sample
根据旧的来更新新的
性质:
-
根据已有的policy 去更新value. 但是是和采样的policy是无关的. 是off-policy learning.
但是需要更多探索, learning rate()不能太大
虽然TD value learning很像梯度下降, 但是并不是梯度下降, 是不动点迭代
Exploration and Exploitation
-greedy
是一个Exploration的方法
每一个时间步, 根据概率去选择: 随机行动()或者根据现有概率行动()
可能会做一些非常愚蠢的动作, 有些动作可以认为是重复无限次.
Optimisitic Exploration Functions
如果一个state value是, 这个state经过了次, 那么
当探索次数比较小的时候, 这个state的function比较大, 会更倾向探索. 如果探索次数比较多, 会趋向于自己本身的value, 根据自己本身的value来选择action