RoCo
Paper
使用LLM进行高层通信和低层路径规划, 提供环境反馈. 引入了RoCoBench, 多机器人写作的基准测试.
Introduce
使多机器人合作, 需要对高层的任务有理解, 并考虑每一个机器人的能力.
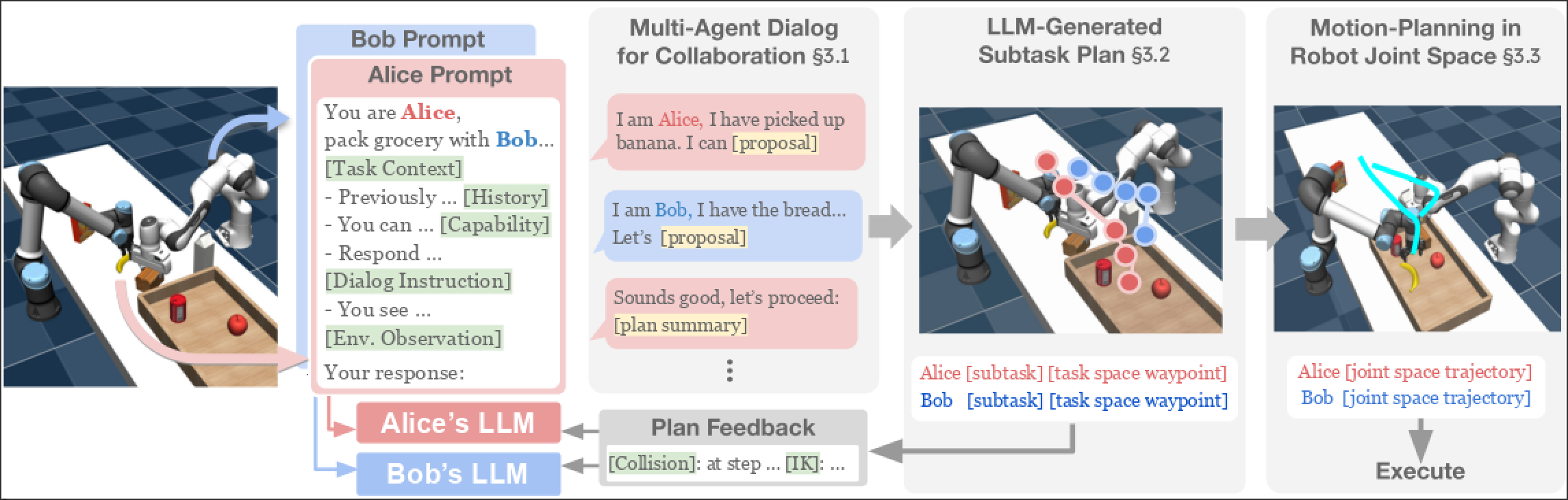
提出了RoCo, 一种零样本(zero-shot)多机器人协作的方法:
- 对话式任务协调: 将每一个robot委托给一个LLM代理, 使robot可以使用natural language进行讨论
- LLM生成并通过反馈改进的子任务计划: multi-agent的对话最终会为每一个代理生成一个子任务. 提供反馈(如碰撞和IK failed), 直到LLM提出一个合理的方案
- 基于LLM的关节空间运动规划: 验证后的子任务中, 提取robot joint space中的目标配置(goal configuration), 使用centralized RRT-sampler去规划motion trajectories. (利用了LLM的3D空间推理)
- 给定任务空间中的起点, 目标和障碍物位置, 展示了LLM可以生成可以包含任务语义和环境约束的路径点, 并显著降低了运动规划的采样复杂度?
RoCoBench:
- 6 robot, multi-agent cooperator
Preliminaries
任务假设:
- 含有个robot agent, 有限时间, 完全观测空间
- 第-th个代理有观测空间. agent可能有非对称的观测空间, 因此通讯是必要的.
- define description functions , 任务语义, observation variable over time-step : , 得到自然语言的描述
- 定义解析函数, 将自然语言的任务描述映射到具体的子任务. 这些子任务can be described by one or more gripper goal configuration
多臂路径规划:
- 是所有个机器人臂的关节配置空间. 是configuration space中的obstacle, 无碰撞空间为
- 初始条件, 目标区域
- 找到一条最优路径, 满足
Multi-Robot Collaboration With LLMs
Multi-Agent Dialog via LLMS
使用Transformer based LLM进行生成对话和action.
需要通信协调agents非对称的observation space
每次环境交互之前先进行一轮对话,
LLM-Generated Sub-task Plan
当一轮对话结束时, 最后一个发言的LLM会进行summary一个plan, 其中每一个agent获取一个子任务, 并可选地获得一个任务空间中的3D路径点. 先进行验证:
- 文本解析: 确保遵循格式, 以及包含了固定的关键词
- 任务约束: 检查每一个动作是否符合任务和代理的约束
- IK: 检查每一个机械臂的位置能否通过IK抵达
- 碰撞检测: 检查通过IK求解的机器人的关节臂配置是否会导致collision
- 有效路径点(可选): 如果任务需要路径规划, 每个中间路径点需要通过IK求解并保证no collision, 并且所有步骤分布均匀
LLM-informed Motion Planning in Joint Space
task通过验证之后, 使用IK生成目标配置, and optionally each step of the task space waypoint paths produces an intermediate goal configuration. goal configuration通过RRT-based multi-arm motion planner, 然后输出每个robot的motion trajectories, 在环境中执行
使用centralized collision-checking and planning for the multi-arm motion planner, 因为environment的几何信息更容易收集和规划
RoCoBench
提出了三个关键属性:
- 任务是否能够分解
- 观测空间是否共享(这个纯粹是人为设置)
- 工作空间重叠
| 任务 | 任务分解 | 观测空间 | 工作空间重叠 |
|---|---|---|---|
| 清扫地板 | 并行 | 非对称 | 中 |
| 打包杂货 | 并行 | 共享 | 中 |
| 移动绳索 | 并行 | 共享 | 高 |
| 整理橱柜 | 顺序 | 非对称 | 高 |
| 制作三明治 | 顺序 | 非对称 | 低 |
| 分类立方体 | 顺序 | 共享 | 低 |
目的是评估:
- 任务分解与分配
- 通信与协调
- 适应性与鲁棒性
- 低层运动规划